
本文参考讲义:https://arxiv.org/pdf/2412.06264 如果发现错误会标注出勘误
Flow matching(FM) 是一种生成模型,想法是通过某种flow,从一个源分布$p(x)$映射到另一个目标分布$q(x)$,通过学习映射的“速度场”,我们就能用flow的方式把源分布的样本$X_0 \sim p$映射到$X_1 := \psi_1(X_0)\sim q$,使其满足我们想要的分布。
Quick Tour and Key concepts
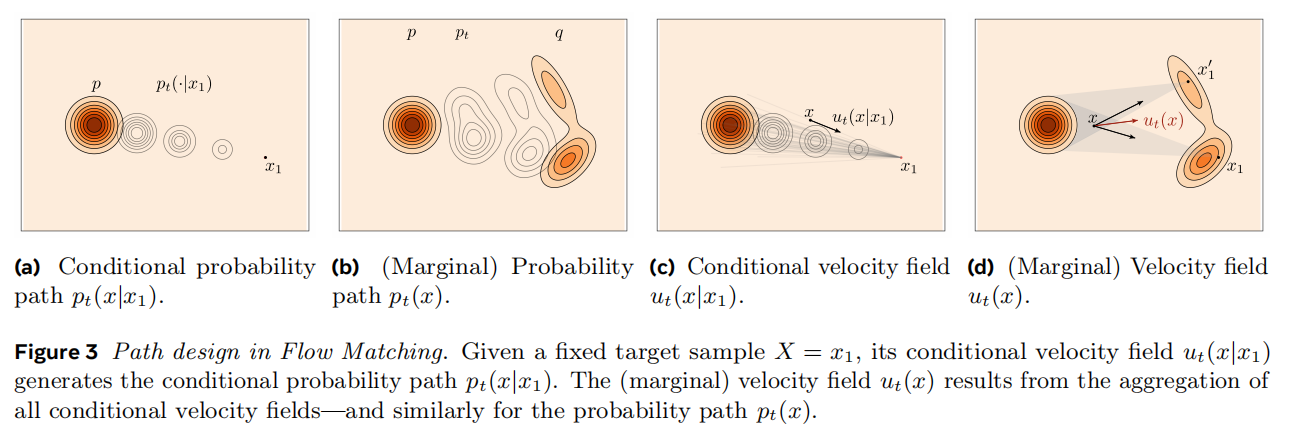
给定训练d维数据集采样自目标分布$q$,我们构造一个概率路径(probability path) $(p_t)_{(0\leq t\leq 1)}$ ,从一个已知的源分布(比如高斯)$p_0 =p$,经过连续时间过程达到目标分布$p_1 = q$,路径上每一个$p_t$是$\mathbb{R}^d$的分布。
当我们训练得到“速度场”之后,就能通过解ODE的方式从$X_0\sim p$算到$X_1 \sim q$。
注:(为什么是解ODE呢,因为flow matching的想法最早来自于Neural ODE solver的那套理论,我们这里的速度场说的就是ODE $\frac{dp}{dt} = v_\theta(x,t)$ 的右侧,现在我们用网络来近似这个场随着空间和时间的分布。)
更严谨形式化地刻画:我们说的time-dependent vector field(速度场)就是一个映射:$u: [0,1] \times \mathbb{R}^d \to \mathbb{R}^d$,其决定了一个time-dependent flow $\psi:[0,1]\times\mathbb{R}^d \to \mathbb{R}^d$, defined as:
\[\frac{d}{dt}\psi_t(x) = u_t(\psi_t(x))\]Or equivalently,
\[\frac{d}{dt}\psi(t,x) = u(t,\psi(t,x))\]如此生成了我们所需要的probability path $p_t$:
\[X_t := \psi_t(X_0)\sim p_t \quad for\quad X_0\sim p_0\]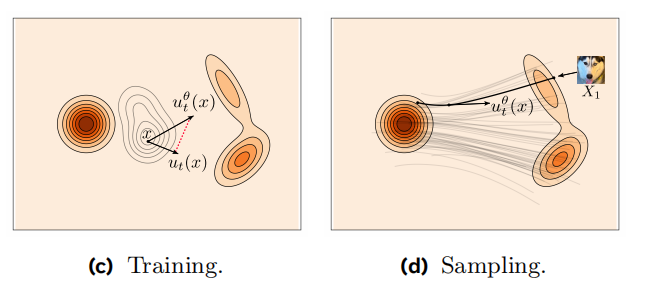
由于速度场最后会被网络参数化,我们将其标记为:$u_t^{\theta}$
更具体一些: 第一步——构建概率路径 我们把源分布取为高斯分布,$p := p_0 = \mathcal{N}(x|0,I)$,概率路径选为条件在目标分布的一个训练样本$x_1$上:
| $$p_{t | 1}(x | x_1)=\mathbb{N}(x | tx_1,(1-t^2)I)$$, so that: |
如此定义的路径也成条件最优传输/线性路径,由此我们可以定义每一时刻的R.V.
\[X_t = t X_1+(1-t)X_0 \sim p_t\]第二步——定义flow matching loss——目标速度场$u_t$和当前模型速度场$u_t^\theta$之间的loss
\[\mathcal{L}_{FM}(\theta)=\mathbb{E}_{t,X_t}||u_t^\theta(X_t)-u_t(X_t)||^2\]其中$t\sim \mathcal{U}[0,1], X_t \sim p_t$
虽然上式很自然地定义了两个速度场之间的残差,但这样定义的loss我们是无法使用的,因为我们并不知道目标速度场$u_t(\cdot)$的取值。
好消息是,当我们把loss 条件在某个训练样本$x_1$上时,会有巨大的简化: Let: $X_{t|1}=t X_1+(1-t)X_0 \sim p_{t|1}(\cdot|x_1)=\mathbb{N}(\cdot|tx_1,(1-t^2)I$ solve:
\[\frac{d}{dt}X_{t|1}=u_t(X_{t|1}|x_1)\]得到条件速度场:
\[u_t(x|x_1) = \frac{x_1-x}{1-t}\]相应的conditional Flow Matching loss:
\[\mathcal{L}_{CFM}(\theta)=\mathbb{E}_{t,X_t,X_1}||u_t^\theta(X_t)-u_t(X_t|X_1)||^2\]且容易发现无条件和有条件的loss对参数的梯度是一样的:
\[\nabla_\theta\mathcal{L}_{FM}(\theta) = \nabla_\theta\mathcal{L}_{CFM}(\theta)\]| 代入$u_t(x | x_1)$的形式后,我们得到了最简单的一种implementation |
Leave a Message